






Сызықтық сатылы жетек – бұл қадамдық қозғалтқышты сызықтық беріліс механизмімен тікелей байланыстыратын және импульстік сигналды басқару арқылы дискретті позицияның қозғалысына қол жеткізетін ашық контурды басқару сызықты жетек құрылғысы. Сызықты қадамдық жетек – бұл электр импульстік сигналдарын дәл сызықтық орын ауыстыруға түрлендіретін, сатылы қозғалтқыштың импульстік қозғалтқыш сипаттамаларын сызықтық қозғалысты шығару мүмкіндігімен біріктіретін электромеханикалық құрылғы. Ол нақты орналастыруды қажет ететін, бірақ жоғары жабық циклды басқаруды қажет етпейтін сценарийлерде кеңінен қолданылады.
Сызықтық сатылы жетектің негізгі ерекшеліктері қарапайым құрылым, төмен баға және кері байланыссыз орналасу, 3D басып шығару, медициналық жабдық, автоматтандырылған орау және т.
Theжұмыс принципібойыншаСызықтық сатылы жетек қадамдық қозғалтқыштардың -қадамдық{1}} айналу сипаттамаларына негізделген:
контроллер қадамдық қозғалтқышты бекітілген бұрышта (мысалы, 1,8 градус/қадам) айналдыру үшін импульстік сигналдарды жібереді, содан кейін бұрандалар мен берілістер сияқты беріліс механизмдері арқылы айналу қозғалысын сызықтық орын ауыстыруға түрлендіреді. Әрбір кіріс импульсі үшін жетек бекітілген қадамдық қашықтықты (әдетте микрометрлерде) жылжытады және орын ауыстыру импульстар санына пропорционалды болады. Ол кері байланыс сенсорларынсыз ашық-циклді дәл басқаруға қол жеткізе алады және салыстырмалы түрде қарапайым құрылымы бар.
Құрылымдық жағынан сызықты қадамдық жетек негізінен үш бөліктен тұрады:
қозғаушы блок (қадамдық қозғалтқыш және жетек тізбегі), беріліс бөлігі (шарлы бұранда немесе трапеция тәрізді бұранда, айналуды сызықтық қозғалысқа түрлендіруге жауапты) және бағыттаушы жүйе (бірқалыпты қозғалысты қамтамасыз ететін сызықтық мойынтіректер немесе бағыттаушы рельстер). Кейбір модельдер шектен тыс жұмыс істеуді болдырмау және жүйе дизайнын жеңілдету үшін шектеу қосқыштарын біріктіреді.
Қолданба төмен және орташа дәлдіктегі позициялау сценарийлеріне бағытталған:
3D принтерлерге арналған саңылаулар беруі, шағын CNC станоктары үшін жұмыс үстелінің жетегі, зертханалық автоматтандыру жабдығына үлгіні тасымалдау, медициналық құрылғылар үшін дозаны бақылау (мысалы, инфузиялық сорғылар), қауіпсіздік жабдығы үшін линзаларды фокустау және т.б.. Оның артықшылығы сервожүйелермен салыстырғанда төмен құнында, қарапайым басқаруда, күрделі тұйық{2}}контурлық тізбектерді қажет етпейді және жұмыс кезінде төмен дірілдеуде.{3} Сызықтық сатылы жетек жеңіл жүктемелері және жоғары қайталануы бар үзік-үзік қозғалыс сценарийлері үшін қолайлы. Қадам дәлдігі әдетте ± 0,01 мм жетуі мүмкін, бұл шағын және орта өлшемді автоматтандыру жабдығының-көптеген қажеттіліктерін қанағаттандырады.
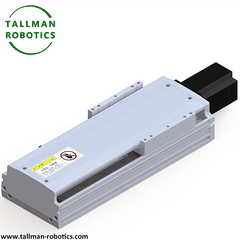
Мұнда біз сізге TMTH8 сызықтық модулінде-құрылған бағыттаушы рельсті төмендегідей таныстырамыз:
Қосымша жобаларды көруге немесе Youtube арқылы бейне галереяға кіруге болады: https://www.youtube.com/@tallmanrobotics
|
Үлгі Жоқ |
Мотор Қуат(Вт) |
Дене ені (мм) |
Қайталану мүмкіндігі (мм) |
Шарлы бұрандалы өзек (C7) |
Максималды жүктеме (кг) |
Инсульт (мм) кезінде Максималды жылдамдық (мм/с) |
Максималды инсульттегі жылдамдық (мм/с) (мм) |
Бағаланған Тарту |
||
|
Сыртқы диаметр (мм) |
Қорғасын (мм) |
Көлденең |
Тік |
|||||||
|
TMTH8 |
100W |
82 |
±0.01 ±0.005 |
16 |
5 |
30 |
10 |
750мм 250мм/с |
1100 мм кезінде 75 мм/с |
341 |
|
10 |
15 |
5 |
750 мм 500 мм/с |
1100мм кезінде 150мм/с |
170 |
|||||
|
20 |
10 |
2.5 |
750мм 1000мм/с |
1100 мм кезінде 300 мм/с |
85 |
|||||
|
200W |
5 |
50 |
15 |
750мм 250мм/с |
1100 мм кезінде 75 мм/с |
682 |
||||
|
10 |
30 |
8 |
750 мм 500 мм/с |
1100мм кезінде 150мм/с |
340 |
|||||
|
20 |
18 |
3 |
750мм 1000мм/с |
1100 мм кезінде 300 мм/с |
170 |
|||||
|
400W |
5 |
50 |
15 |
750мм 250мм/с |
1100 мм кезінде 75 мм/с |
1353 |
||||
|
10 |
40 |
12 |
750 мм 500 мм/с |
1100мм кезінде 150мм/с |
674 |
|||||
|
20 |
22 |
5 |
750мм 1000мм/с |
1100 мм кезінде 300 мм/с |
337 |
|||||









Басқару әдістері, өнімділік сипаттамалары және қолданылатын сценарийлер бойынша сызықты қадамдық қозғалтқыш жетектері мен желілік сервоқозғалтқыш жетектері арасында айтарлықтай айырмашылықтар бар. Арнайы айырмашылықтар келесідей:
1. Басқарудың әртүрлі принциптері
Сызықтық сатылы қозғалтқыш жетекі: ашық контурды басқаруды қабылдайды, импульстік сигналдарды қабылдау арқылы қозғалтқышты бекітілген қадамдық қашықтықта айналуға (немесе түзу сызықта қозғалуға) жетектейді және орынға кері байланыс датчиктерін қажет етпей, орын ауыстыру импульстар санына қатаң сәйкес келеді. Импульстік сигнал дәл болғанша, алдын ала орнатылған қозғалысқа қол жеткізуге болады, бірақ ол нақты позицияның нұсқаудан ауытқығанын сезе алмайды.
Сызықтық сервомотор жетекі: тұйық{0}}контурлық басқаруды қабылдайды, позиция сенсорларын біріктіреді (тор сызғышы, кодер сияқты) және нақты уақыт режимінде нақты позиция мен жылдамдықты контроллерге қайтарады. Контроллер пәрмен мәнін кері байланыс мәнімен салыстырады, қозғалыс дәлдігін қамтамасыз ету үшін шығысты динамикалық түрде реттейді және жүктеменің өзгеруінен және механикалық қателерден туындаған ауытқуларды түзете алады.
2. Әртүрлі дәлдік пен қателерді өңдеу мүмкіндіктері
Сызықтық сатылы қозғалтқыш жетекі: дәлдік қатені түзету мүмкіндігінсіз қадамдық бұрыштың (немесе сызықтық қадамның) консистенциясына байланысты. Егер жүктеме тым үлкен болса және импульс жиілігі тым жоғары болса, қадамның жоғалуы мүмкін (нақты орын ауыстыру бұйырылған орын ауыстырудан аз), қателер жинақталады. Қадам дәлдігі әдетте ± 0,01 мм 0,1 мм болады.
Сызықтық сервомотор жетекі: Жабық{0}}контурлық кері байланыс арқылы нақты уақытта қатені түзету, кедергіге қарсы күшті қабілеттілік, жоғары қайталану дәлдігі (± 0,001 мм 0,01 мм дейін), тіпті жүктеме ауытқуы немесе сыртқы кедергі болса да, оны жиынтық қателіксіз реттеу арқылы пәрменді күйге келтіруге болады.
3. Әртүрлі жылдамдық пен динамикалық жауап
Сызықтық сатылы қозғалтқыш жетекі: тұрақты төмен жылдамдық өнімділігі, бірақ жоғары{1}}жылдамдықтағы жұмыс кезінде дірілге және қадамның жоғалуына бейім және шығыс моменті жылдамдық жоғарылаған сайын азаяды («қадамды жоғалту» қаупі бар), төмен-жылдамдық және үзіліссіз қозғалыс сценарийлері үшін қолайлы.
Сызықтық сервоқозғалтқыш жетекі: жылдам жоғары{0}}жылдамдықпен және жабық{1}}контурлық басқарумен ол кең жылдамдық диапазонында тұрақты өнімді сақтай алады. Жеделдету және баяулау процестері тегіс, бұл оны жылдам бастауды тоқтатуды немесе үздіксіз жоғары-жылдамдықты қажет ететін сценарийлер үшін қолайлы етеді.
4. Әртүрлі жүк көтергіштігі мен айналу моментінің сипаттамалары
Сызықтық сатылы қозғалтқыш жетекі: шығыс моменті (немесе тарту күші) жылдамдық артқан сайын азаяды. Төмен жылдамдықта айналу моменті үлкенірек, бірақ жоғары жылдамдықта ауыр жүктемелер кезінде шамадан тыс жүктеуге бейім. Ол жеңіл жүктемелерге (әдетте 500Н-ден аз) және төмен инерция сценарийлеріне жарамды.
Сызықтық сервомотор жетекі: жабық{0}}контурды басқару арқылы шығыс күшін жүктеменің өзгеруіне сәйкес реттеуге болады. Оның жоғары{2}}жылдамдығы мен ауыр жүк-мүмкіндіктері жоғары және жоғары жылдамдықта тұрақты тартуды сақтай алады. Ол орташа және жоғары жүктемелер (мыңдаған Ньютонға дейін) және жоғары инерциялық сценарийлер үшін қолайлы.
5. Әртүрлі шығындар мен күрделіліктер
Сызықтық сатылы қозғалтқыш жетекі: қарапайым құрылым, кері байланыс сенсорларының қажеті жоқ, жеңілдетілген басқару тізбегі, төмен баға (әдетте сервожүйенің 1/3~1/2), жөндеу қиындығы төмен, бюджеті шектеулі шағын және орташа өлшемді жабдыққа жарамды.
Сызықтық сервомотор жетекі: сенсорлар мен күрделі тұйық циклды басқару алгоритмдерін біріктіруді талап етеді, бұл қымбатқа түседі, ал контроллерді жөндеу (параметрлерді баптау сияқты) күрделірек, бұл оны өнімділік талаптары жоғары дәлдіктегі жабдық үшін қолайлы етеді.
6. Қолданылатын әртүрлі сценарийлер
Сызықтық сатылы қозғалтқыш жетекі: дәлдігі төмен, жеңіл жүктеме, төмен{0}}жылдамдықты қайталанатын қозғалыс сценарийлері үшін қолайлы, мысалы, 3D принтердің саптама беруі, шағын тасымалдау жабдығы, зертханалық үлгінің сатысын анықтау, тұрмыстық техниканың клапанын басқару және т.б.
Сызықтық сервомотор жетекі: жартылай өткізгіш пластинаны өңдеу, лазерлік кесу позициясын анықтау, дәл құрастыру роботтары, медициналық хирургиялық жабдық және т.б. сияқты жоғары{0}}дәлдік, жоғары жүктеме, жоғары-жылдамдық динамикалық жауап сценарийлері үшін қолайлы.
Жиынтық және салыстыру кестесі
|
Салыстыру өлшемі |
Сызықтық сатылы қозғалтқыш жетекі |
Сызықтық сервоқозғалтқыш жетек |
|
Басқару режимі |
Ашық цикл (кері байланыс жоқ) |
Жабық цикл (позиция/жылдамдық кері байланысы бар) |
|
Дәлдік |
Орташа (± 0,01 мм 0,1 мм), түзету жоқ |
Жоғары дәлдік (± 0,001мм 0,01мм), түзетілетін |
|
Жылдамдық және жауап |
Төмен жылдамдықта тұрақты, жоғары жылдамдықта қадамдарды жоғалту оңай |
Жоғары жылдамдықта жылдам жауап, тегіс жұмыс |
|
Жүк көтергіштігі |
Жеңіл жүктеме, жоғары{0}}жылдамдық моменті төмендеді |
Орташа жоғары жүктеме, тұрақты жоғары{0}}жылдамдық моменті |
|
Құны |
Төмен |
Жоғары |
|
Негізгі артықшылықтар |
Қарапайым басқару, төмен баға, төмен{0}}жылдамдық дірілсіз |
Жоғары дәлдік, күшті кедергіге қарсы-, жақсы жоғары{1}}жылдамдық |
Таңдау кезінде қолданбаның дәлдік, жылдамдық, жүктеме және шығындар бюджетіне қойылатын талаптары негізінде жан-жақты пайымдау жасау қажет: жеңіл және қарапайым сценарийлер үшін қадамға артықшылық беріледі, ал жоғары -дәлдік және жоғары динамикалық сценарийлер үшін серво қажет.
Ыстық тегтер: сызықты қадам жетекі, Қытайдағы желілік қадамдық жетек өндірушілері, жеткізушілері, зауыты



